Wykonane prace


Marine Technology sp. z o.o. jest organizacją non profit o profilu badawczym, a głównym przedmiotem działalności jest prowadzenie prac badawczo-rozwojowych w dziedzinie nauk technicznych. Spółka, od rozpoczęcia działalności w lutym 1998, podejmuje różnorodną tematykę prac badawczych, włączając w to także sztuczną inteligencję, a wykorzystanie nowoczesnych technologii i ukierunkowanie na innowacje jest wspólnym mianownikiem podejmowanych zagadnień. Marine Technology jest w 100% w rękach polskich udziałowców.
Projekty badawcze współfinansowane przez NCBiR w ramach programu POIR:
HydroNav3D
„System autonomicznej nawigacji i automatycznej hydrografii 3D bezzałogowej platformy pływającej” POIR.01.01.01-00-0899/18. 01.10.2019 – 30.09.2022. Budżet projektu 2 948 750,00zł, w tym NCBiR 2 241 950zł. Kierownik: prof. dr hab. inż. Andrzej Stateczny. Projekt w trakcie realizacji.
HydroDron
„Opracowanie autonomicznej/zdalnie sterowanej pływającej platformy dedykowanej pomiarom hydrograficznym na akwenach ograniczonych” POIR.01.02.00-00-0074/16. 01.11.2016 – 31.10.2019. W ramach projektu została zbudowana innowacyjna światowej klasy autonomiczna hydrograficzna platforma pomiarowa wyposażona w nowoczesne sensory. Budżet projektu 2 560 662zł w tym NCBiR 2 027 937.60zł. Kierownik: prof. dr hab. inż. Andrzej Stateczny.
Żaden kraj na świecie nie produkuje tak zaawansowanej, wyposażonej w sztuczną inteligencję, platformy dedykowanej pomiarom hydrograficznym. Produkcja seryjna jest w trakcie uruchamiania.
Projekty badawcze finansowane przez NCBiR w ramach programu LIDER:
4DShoreMap
„Innowacyjny system wielowymiarowego i wieloczasowego monitoringu strefy brzegowej z wykorzystaniem autonomicznej bezzałogowej jednostki pływającej” LIDER/4/0026/L-12/20/NCBR/2021. Budżet projektu 1 500 000zł. Kierownik: dr inż. Marta Włodarczyk-Sielicka.
INNOBAT
„Innowacyjny autonomiczny bezzałogowy system monitoringu batymetrycznego akwenów płytkowodnych” LIDER 0030/L-11/2019. Budżet projektu 1 500 000zł. Kierownik: dr inż. Mariusz Specht.
SHREC
„System automatycznego rozpoznawania i identyfikacji jednostek pływających na akwenach objętych monitoringiem wideo” LIDER 0098/L-8/2016. Budżet projektu 1 200 000zł. Kierownik: dr inż. Natalia Wawrzyniak.
MOBINAV
„Mobilna Nawigacja Śródlądowa” LIDER/039/693/L-4/12/NCBR/2013. Budżet projektu 819 720zł. Kierownik: dr hab. inż. Witold Kazimierski.
Marine Technology jest zdecydowanym liderem wśród firm w programie LIDER. Wszystkie projekty prowadzone są zgodnie z metodologią PRINCE2.


Realizacja zamówienia na usługi związane z badaniami i pomiarami za pośrednictwem jednostki bezzałogowej dla projektu o akronimie MPSS:
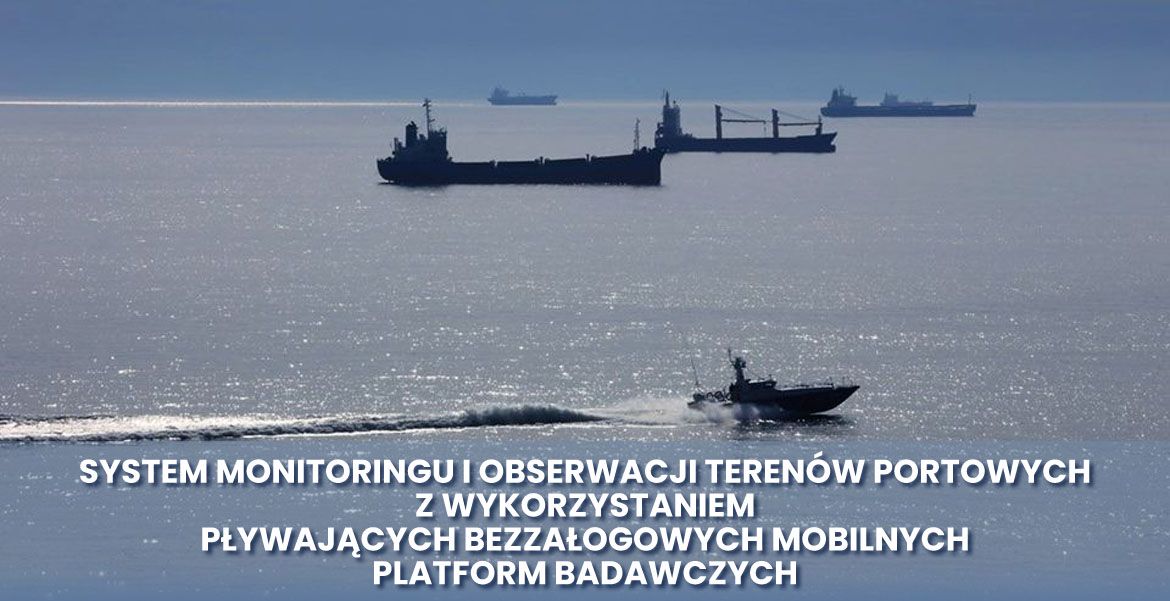
Projekt MPSS, czyli „System monitoringu i obserwacji terenów portowych z wykorzystaniem pływających bezzałogowych mobilnych platform badawczych”, był pierwszym przedsięwzięciem realizowanym przez Zarząd Morskiego Portu Gdynia S.A. przy wsparciu środków, które pochodziły z funduszy mechanizmu norweskiego w obecnej perspektywie.
Celem projektu MPSS było określenie możliwości uzyskania od jednostek administracji państwowej, akredytacji badań przeprowadzanych za pomocą nawodnych platform bezzałogowych oraz rekomendacje w zakresie ujednolicenia standardów technicznych w tym obszarze.
Projekt polegał na wykorzystaniu mobilnej platformy badawczej w działalności portu gdyńskiego oraz obejmuje dwa bardzo ważne zadania, które zostanły zrealizowane do dnia 31 grudnia 2023 roku.
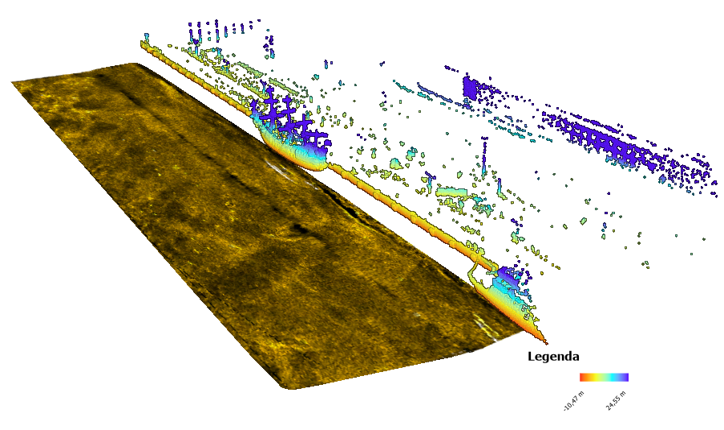
Zadanie 1: Wykonywanie pomiarów hydrograficznych: pomiarów batymetrycznych i badań sonarowych na wskazanych akwenach portowych.
Zadanie 2: Automatyczny pobór próbek wody (powierzchniowej i głębinowej) i osadów dennych, w wyznaczonych punktach pomiarowych oraz pomiarów wykonanych przy wykorzystaniu siatki planktonowej o każdej porze roku.
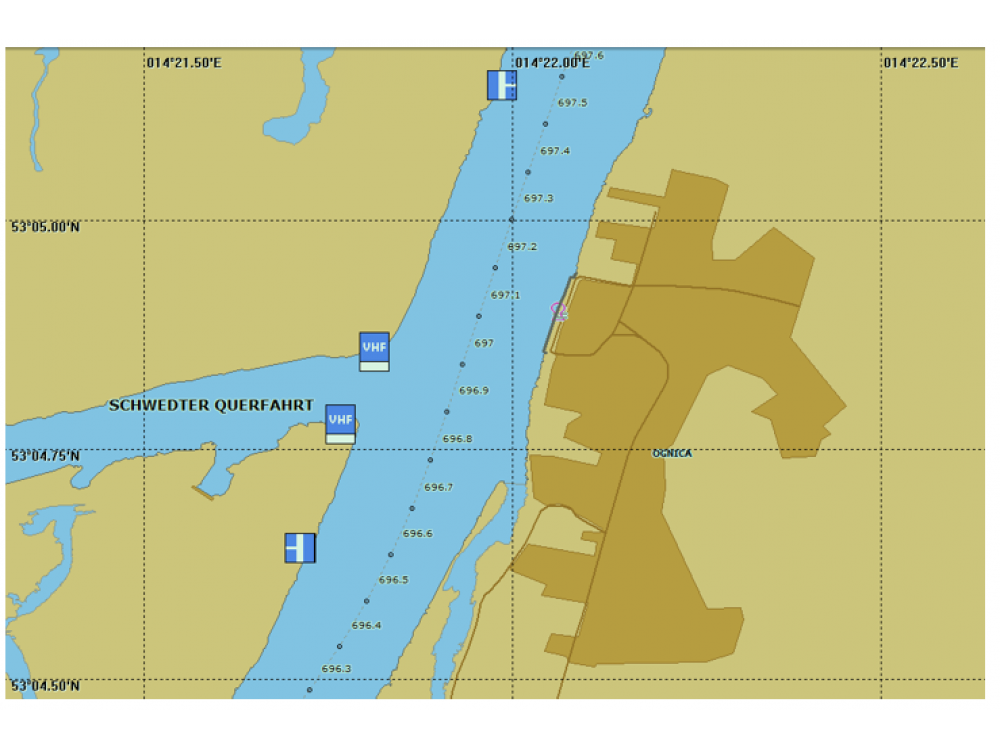
Projektowanie infrastruktury nawigacyjnej na akwenach morskich i śródlądowych oraz wieloletnie badania w zakresie map elektronicznych (ENC), w tym zdobyte w trakcie opracowywania ENC dla Rzecznego Systemu Informacyjnego (RIS). Marine Technology wykonało w 2013r. kolekcję, pierwszych w Polsce, śródlądowych ENC obejmujących cały obszar wdrożenia systemu RIS Dolnej Odry. Mapy te zostały wdrożone w Centrum RIS.
IENC
Kolekcję 10 baz danych map elektronicznych opracowano dla systemu RIS w firmie Marine Technology. Zakres map obejmował szlaki żeglugowe od portu Szczecin do miejscowości Ognica.
Firma Marine Technology ma nadany oficjalny kod producenta map elektronicznych, wymieniony w dokumencie IHO S-62 – LIST OF DATA PRODUCER CODES.
Obecnie firma dysponuje pełną linią produkcyjną, a także doświadczeniem, umożliwiającym tworzenie oraz aktualizację map elektronicznych dla żeglugi śródlądowej. Zakres opracowania obejmować może dowolne drogi wodne. W zakresie produkcji map elektronicznych firma może również prowadzić ich ciągłą aktualizację.


W roku 2015 konsorcjum pod kierunkiem Marine Technology opracowało Program Funkcjonalno-Użytkowy Pełnego Wdrożenia RIS Granicznego i Dolnego Odcinka Odry (500 000zł) na zlecenie Urzędu Żeglugi Śródlądowej w Szczecinie.
RIS (River Information Services) jest systemem, który ma na celu poprawę bezpieczeństwa żeglugi oraz usprawnienie transportu wodnego na rzekach śródlądowych. Są to usługi związane z IT, zaprojektowane w celu optymalizacji ruchu i procesów transportowych w żegludze śródlądowej, tj. w celu usprawnienia szybkiego elektronicznego przesyłania danych między wodą a lądem poprzez wymianę informacji z wyprzedzeniem oraz w czasie rzeczywistym… Czytaj więcej
W roku 2014 opracowane zostało Studium Wykonalności budowy Informatycznego Systemu Ewidencji Urządzeń Melioracyjnych o akronimie ISEUM.
W ramach wykonania Studium Wykonalności opisano (i szerzej omówiono) wykonalność techniczno-technologiczną, wykonalność instytucjonalną oraz wykonalność finansowo-ekonomiczną.
Projekt opracowania koncepcji budowy Informatycznego Systemu Ewidencji Urządzeń Melioracyjnych (ISEUM) dotyczył opracowania koncepcji budowy Informatycznego Systemu Ewidencji Urządzeń Melioracyjnych (ISEUM) w oparciu o dotychczasowe rozwiązania technologiczne Zachodniopomorskiego Zarządu Melioracji i Urządzeń Wodnych w Szczecinie w zakresie elektronicznej ewidencji wód, urządzeń melioracji wodnych oraz zmeliorowanych gruntów.
Firma dokonała następujących zgłoszeń patentowych:
„Układ nadzoru i reagowania sytuacji kolizyjnej wokół małej autonomicznej i bezzałogowej jednostki pływającej” Pat.240063
„Automatyczny układ nadzoru nad sterowaniem ruchem jednostki pływającej na akwenach morskich, śródlądowych i około-morskich, zwłaszcza dla jednostek autonomicznych i bezzałogowych” P.432992
„Układ do tworzenia hydrograficznych map sferycznych dookólnych i przestrzennych przy użyciu technik hydroakustycznych i optoelektronicznych” P.436208
„Zespolony moduł bezzałogowych jednostek hydrograficznych - nawodnej i powietrznej dla prowadzenia pomiarów batymetrycznych akwenów przybrzeżnych zwłaszcza przybrzeżnych płytkowodnych” P.437942
Z afiliacją Marine Technology zostało opublikowanych wiele publikacji naukowych, m.in. w Remote Sensing, Sensors, Journal of Navigation, Polish Maritime Research, Information Technology and Control, ISPRS International Journal of Geo-Information i innych.
Przykłady wykonanych prac:
W 2024 roku na zlecenie Urzędu Żeglugi Śródlądowej w Szczecinie wykonano analizę identyfikacji potrzeb w zakresie wdrożenia systemu CEERIS na obszarze działania systemu RIS w Polsce.
Opracowanie oprogramowania pozwalającego na wizualizację i przetwarzanie danych sonarowych SONARMUS wraz z zestawem danych testowych oraz raportem z badań walidacyjnych (walidacja zaimplementowanych algorytmów na danych sonarowych pozyskanych za pomocą jednostki typu USV). Usługa badawczo-rozwojowa wykonana na zlecenie Centrum Innowacji Akademii Morskiej w Szczecinie sp. z o.o.
Opracowanie zaleceń operacyjnych i parametrów pracy naziemnego systemu radionawigacyjnego RMode wykorzystującego lądową infrastrukturę stacji DGPS oraz AIS (2018), czyli wykonanie przeglądu dokumentów normatywnych (IMO, IALA, ITU-R etc.) i opisu funkcjonalności oraz zakresu oczekiwanych wartości parametrów projektowanego systemu R-Mode, jego stacji brzegowych i odbiornika pokładowego. Opracowano również analizę naziemnych systemów radionawigacyjnych współczesnych i historycznych, które stosowały zasadę radiowego pomiaru pozycji na podstawie odległości od stacji referencyjnych na brzegu.

W 2018 roku na zlecenie fundacji WWF wykonano testy za pomocą własnego sonaru 3D, mające na celu sprawdzenie skuteczności wykrywania zagubionych narzędzi połowowych metodami akustycznymi w wodach Bałtyku w ramach międzynarodowego projektu „Marelitt Baltic”.
W latach 2013-2015 realizowane były pomiary hydrograficzne: batymetria i sonar w trakcie budowy LNG w Świnoujściu; przed, w trakcie i powykonawcze.
Wykonanie audytu i PFU w ramach budowy projektu systemowego „Regionalna Infrastruktura Informacji Przestrzennej Województwa Zachodniopomorskiego” (504 300zł).
Wykonanie projektu technicznego systemu Smart Buoy (SMB) zgodnie z założeniami projektu koncepcyjnego pn. Efficient, Safe and Sustainable Trafic at Sea – EfficienSea 2 finansowanego w programie H2020, a w 2018r. - opracowanie zaleceń operacyjnych i parametrów pracy naziemnego systemu radionawigacyjnego R-Mode wykorzystującego lądową infrastrukturę stacji DGPS oraz AIS” dla Urzędu Morskiego w Gdyni.
Opracowanie algorytmów funkcji ARPA (Automatic Radar Plotting Aids) i manewrowania względnego dla systemu ARPA produkowanego przez Przemysłowy Instytut Telekomunikacji (PIT).
Opracowanie algorytmów śledzenia obiektów wdrożonych w produkowanym przez Przemysłowy Instytut Telekomunikacji (PIT) Cichym Radarze Morskim.
Opracowanie i wdrożenie interfejsu operatora cichego radaru morskiego. Zamawiający: PIT.
Opracowanie i wdrożenie w Akademii Marynarki Wojennej rejestratora sygnałów radarowych.
Opracowanie algorytmów i oprogramowania manewrowania taktycznego okrętów. Efekty pracy zostały wdrożone w systemie dowodzenia okrętów Marynarki Wojennej produkowanym przez Centrum Techniki Morskiej (CTM).
Opracowanie projektu ujednolicenia technicznego i funkcjonalnego stacji bazowych na wybrzeżu zachodnim w systemie AIS-PL. Zamawiający: Urząd Morski w Gdyni.
Badanie sygnału wizyjnego radaru FMCW pod kątem możliwości jego wykorzystania w procesie fuzji informacji. Zamawiający: Akademia Morska w Gdyni.
Opracowanie analizy nawigacyjnej w zakresie rozbudowy portu żeglarskiego we Fromborku. Praca wykonana na zlecenie pracowni architektonicznej w Gdańsku.
Opracowanie analizy żeglugowo - nawigacyjnej w zakresie budowy przystani śródlądowych w Drewnicy i Rybinie. Praca wykonana na zlecenie pracowni architektonicznej w Gdańsku.
Wszechstronne badania systemu nawigacji i kierowania uzbrojeniem okrętów. Zamawiający: Centrum Techniki Morskiej.
Opracowanie koncepcji algorytmów oprogramowania realizującego składanie informacji o cechach radarowych kilku różnych radarów impulsowych i na falę ciągłą. Zamawiający: Akademia Morska w Gdyni.
Opracowanie warstw tematycznych elektronicznej mapy nawigacyjnej wybranego fragmentu portu Gdynia. Zamawiający: MGGP Aero Sp. z o.o.
Opracowanie założeń i oprogramowania rejestracji danych sondażowych. Zamawiający: ShipFox Sc.
Wykonanie i uruchomienie oprogramowania sterującego ruchem bezzałogowej platformy nawodnej w wypadku utraty łączności ze stanowiskiem dowodzenia oraz przeprowadzenie testów oprogramowania w warunkach laboratoryjnych. Zamawiający: SPORTIS S.A.
Wielokrotne pomiary batymetryczne akwenów portowych, śródlądowych i morskich wód wewnętrznych we współpracy z firmą HYDRO-IN.
Wykonanie projektu modelu laboratoryjnego systemu dynamicznego pozycjonowania metodami porównawczym wdrożonego w AMW w Gdyni.
Projekt ustanowienia morskiego systemu różnicowego RTK na wybrzeżu zachodnim RP w ramach projektu KSBM. Zamawiający: Urząd Morski w Gdyni.
Opracowanie warunków modernizacji infrastruktury Stacji Nautycznej Dziwnów, w aspekcie funkcji stacji brzegowej systemu DGPS-PL w projekcie Krajowy System Bezpieczeństwa Morskiego-I.


Adres
ul. Roszczynialskiego 4 lok. 6
81-521 Gdynia
ul. Niemena 13 lok. 5
81-603 Gdynia
ul. Klonowica 37 lok. 5
71-248 Szczecin