MOBINAV
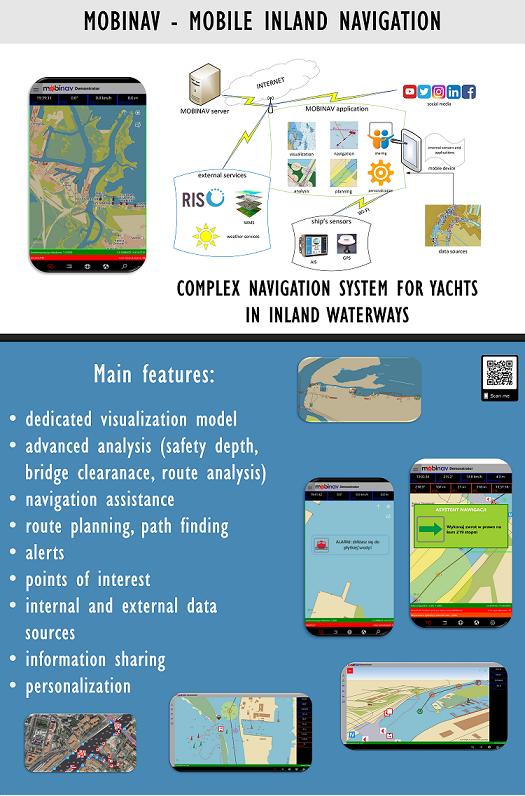
Developing of a mobile navigation system for inland waterways was the main objective of the research project „Mobile Inland Navigation”, funded by NCBiR under the LIDER program. The system will based, on the model of car navigation systems. System will be provide the full necessary informations to the end user in the inland areas (e.g. tourist who sails recreationally). The main scientific purposes is to development of spatial data processing method for the needs of mobile cartographic and efficient navigation on inland waterways. The practical aim is to develop a system MOBINAV which will be the expansion of the car navigation conception for inland waterways. Ultimately, the system will consist an application installed on the mobile device (hereinafter referred to as a mobile application), and a desktop server.
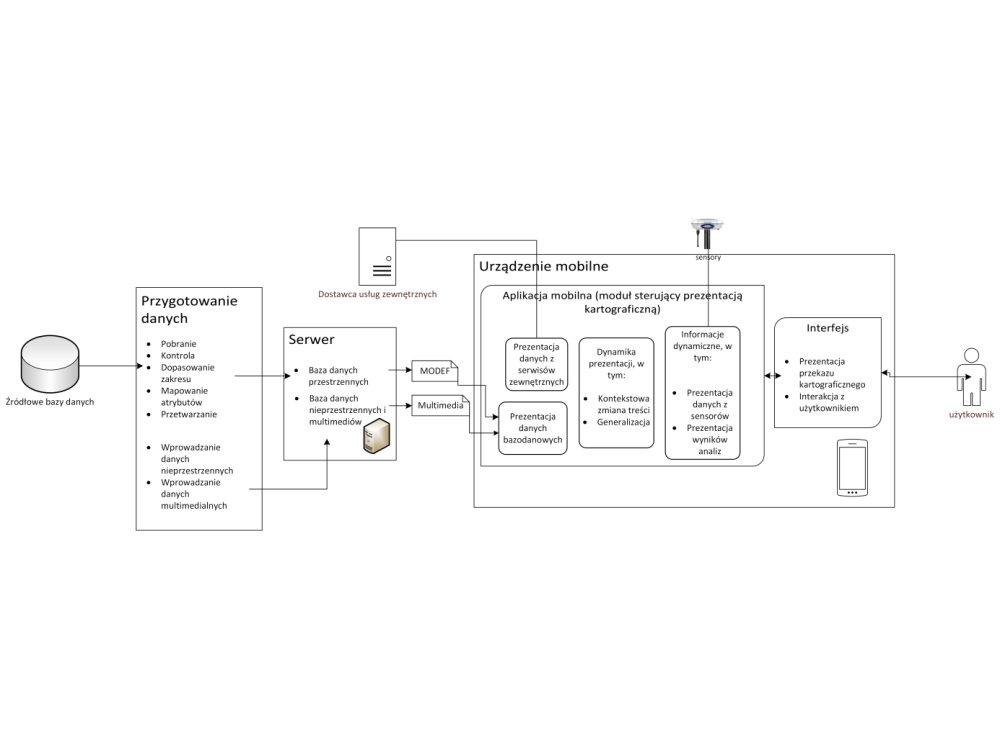
Ultimately, the system consists of an application installed on a mobile device (called a mobile application) and a stationary server. An additional source of dynamic data can be sensors in a mobile device or external ship sensors, e.g. GNSS (Global Navigation Satellite System) receivers or a transponder or AIS (Automatic Identification System) receiver. It is also possible to use information from external service providers, such as RIS (River Information System) or WMS (Web Map Service) providers. Achieving full system functionality requires access to the Internet directly from the device (usually via the mobile network), however, the basic functions are also available off-line.
From the end-user point of view, the described system can be equated to an application on a mobile device, but in reality its scope is much wider, and its structure includes a number of problems to be solved related to the processing of spatial data. The main components of the system are the data management module, the spatial analysis module and the cartographic presentation module. The data management module allows you to integrate data from source databases and develop them in a form suitable for MOBINAV. For effective data management, a proprietary MODEF format was proposed, based on GML, in which selected and integrated source data are stored.
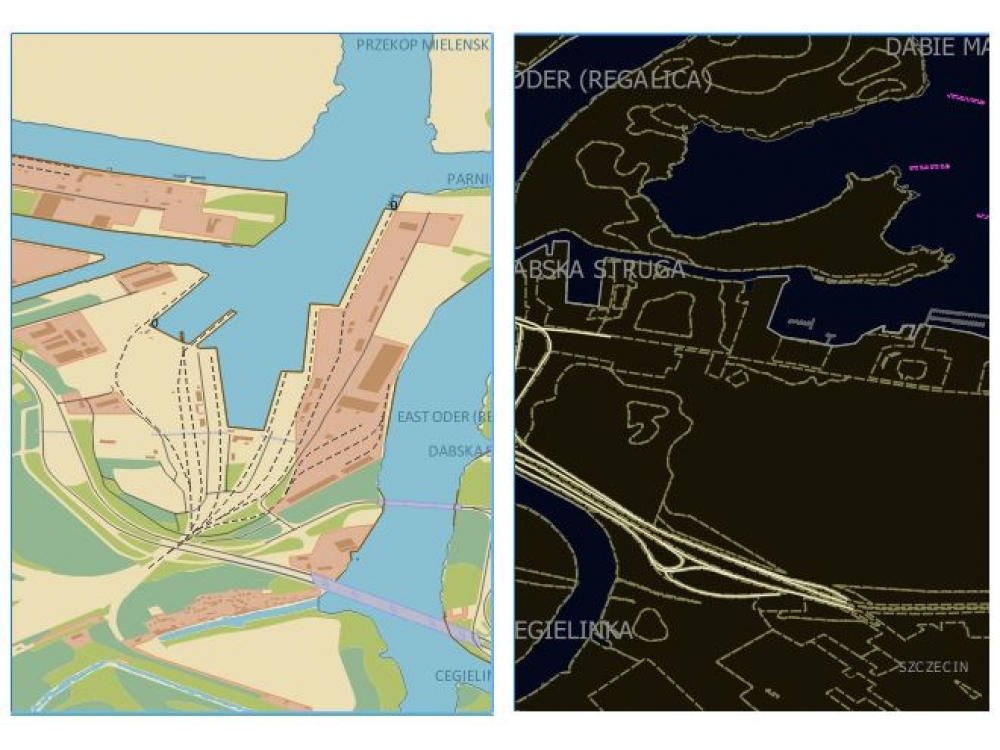
One of the key elements of building a mobile navigation system was the spatial information presentation model, which has a direct impact on the perception of information products by the user. As part of the project, a model of mobile cartographic presentation was developed, based on scientific literature. A proprietary tool for building this model was also developed, based on the QGIS technology.
Scientific publications related to MOBINAV
Address
4/6 Roszczynialskiego St.
81-521 Gdynia
13/5 Niemena St.
81-603 Gdynia
37/5 Klonowica St.
71-248 Szczecin