HydroDron
A HydroDron is an Autonomous Surface Vehicle adapted to perform measurement missions in restricted waters. Missions are carried out in the field of bathymetric, sonar, LiDAR, and other measurements. The unit can work in an autonomous mode, following the planned trajectory or in the remote control mode, especially useful in a difficult navigation situation, in areas that are inaccessible or difficult to access for larger crew units. It is possible to transport the unit to the mission area on a car trailer or a larger surface unit – a base vessel and launch it from a trailer from the beach, shore, quay, pier, or base vessel.
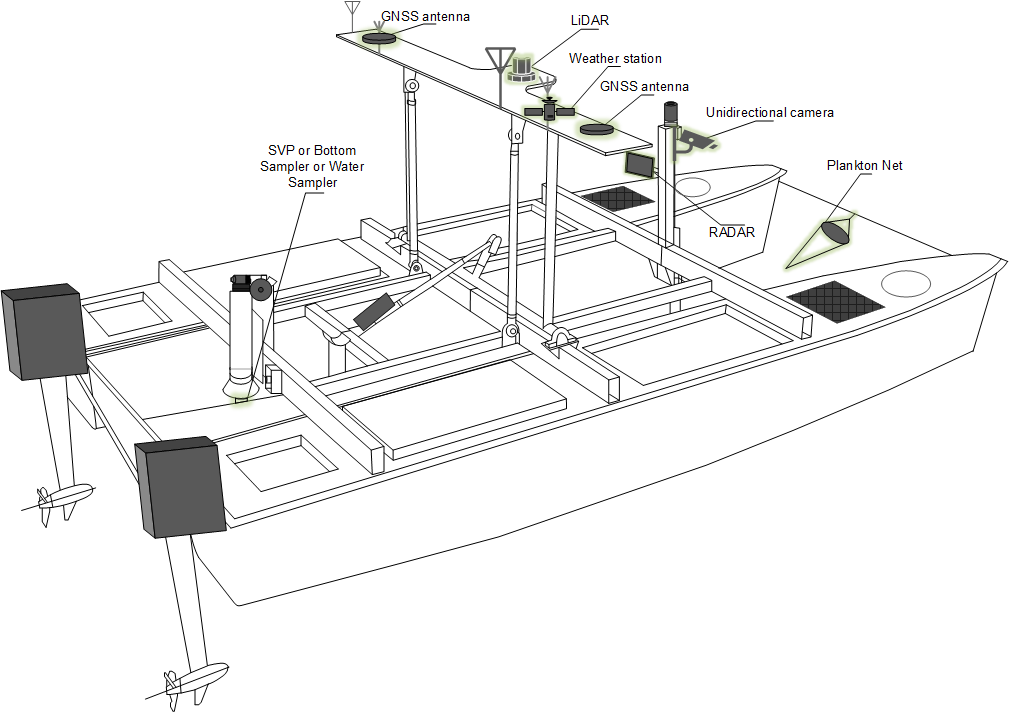
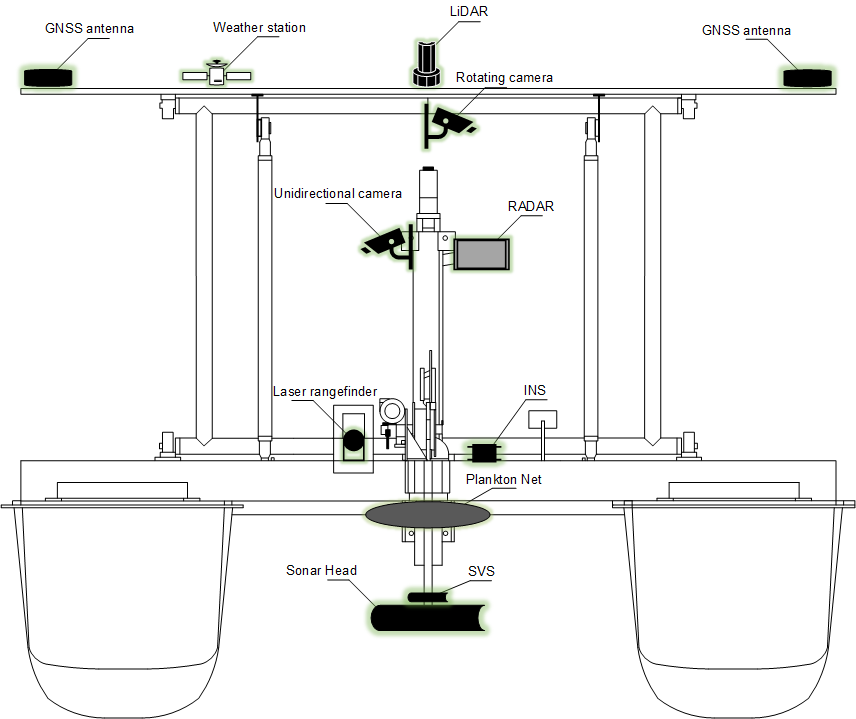
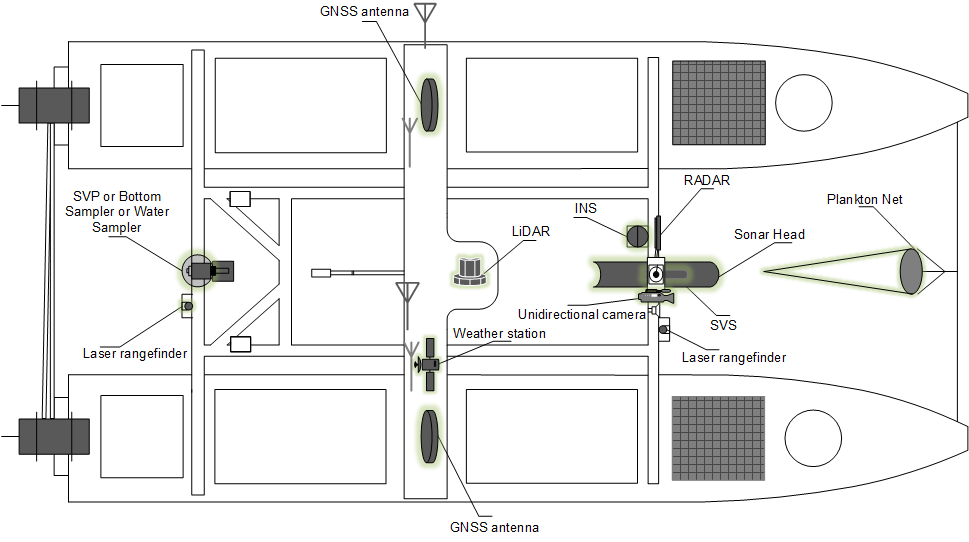
The navigation sensors are placed on an automatically folding mast, which ensures safe transport of the unit and access to the measuring area. The sonar head is mounted on a movable actuator that allows the head to be raised and lowered remotely, and the sound velocity profiler in water is automatically lowered and raised by a special windlass.
The HydroDron is also equipped with a set of sensors to monitor the situation on and around the platform. The anticollision system consisted of RADAR, two laser rangefinders (bow and stern), as well as LiDAR and two single beam echosounders located in both hulls is used to avoid collisions with objects on the water, to determine the area allowed for hydrographic measurements and the area of acceptable maneuvers, In addition to typically navigational data, data from video cameras (rotating and unidirectional camera), weather information from weather stations, battery voltage level, the position of the mast, and the hydrographic head actuator are recorded. This data is transmitted to the coast station. Hydrographic data from the multi-beam echosounder and LiDAR are recorded on on-board industrial computers.


|
Technical specification of the unit |
|
| Construction |
Floats: laminate Other elements: acid-resistant steel |
| Dimensions |
Length: 4m Width: 2 m Height: 1m (antenna gantry lowered) Height: 1.40m (antenna gantry raised) |
| Weight | About 300kg |
| Engines | Torqeedo Cruise 4.0RL with a power of 0-4kW |
| Velocity |
Maximum: 14 kn Straight-through: 6 kn Measuring: 3-4 kn |
| Immersion |
Hulls: 0.25m Engines: 0.5m MBES head: 0.5m (down position) |
| Batteries | Batteries allowing up to 12 hours of operation at measuring speed + 2 auxiliary photovoltaic panels |
| Communication | Autonomous control over the vessel up to 40km, data transmission up to 6km |
| Multifunctional equipment | Lowered sonar head, lifted mast, elevator with 20m of rope for lowering the SVP or other equipment |
| Chassis | Boat trailer with aluminium flooring adjusted to launching in water |
On the shore, the operator has two control consoles and one hydrographic console. Dedicated navigation console is placed in a compact cover (no. 1) which is protecting against dust, water, and shocks, and a small maneuvering console (no. 2) for manual control of the vessel near the shore, including for mooring. There is also a hydrographic console with a Getac computer (no. 3) and radio mast for communication (no. 4).
The main hydrographic software used on the platform is HYPACK MAX with the addition of HYSWEEP. Thanks to the work in this software, the entire process of hydrographic measurements is ensured, from planning measurement works to the development of the final product. Additionally there is software provided by hardware producents.
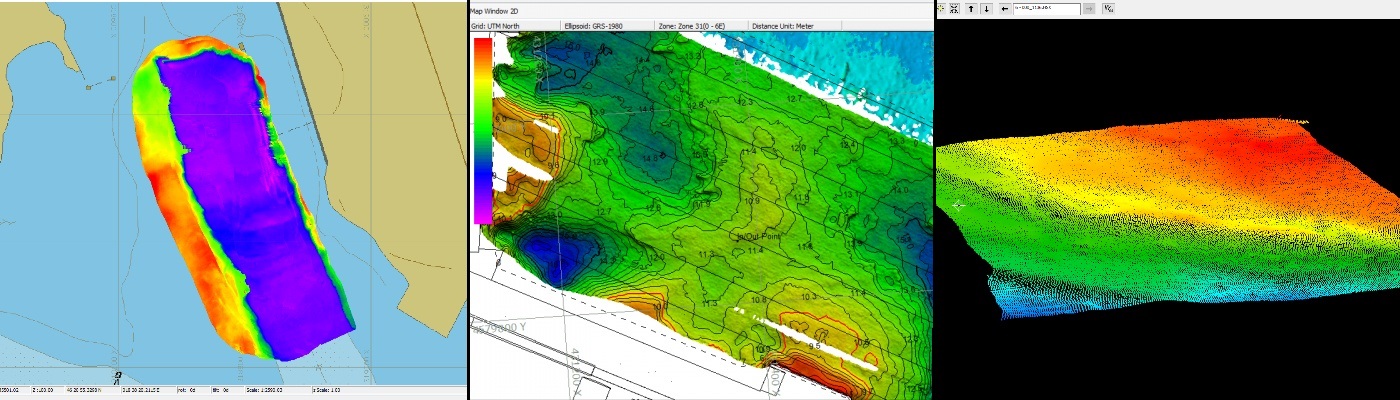
Hydrographic equipment
- AML SVP Base X2: this profiler can continuously registration data for 11 hours provided a fully charged battery. It is adapted to be lowered up to 100 meters. Communication with base can be established in two ways: via an integrated WiFi network or a direct serial connection with RS-232 or RS-485. The device can be powered internally or externally. X•Series Instrumentation – Simplify Oceanographic Data Collection (amloceanographic.com)
- AML SV Xchange: the sound velocity sensor stores all essential calibration data internally. It is compatible with registration and data processing software.
- SBG Ekinox2 Subsea: Inertial Navigation System encompasses state-of-the-art motion sensors and real-time Kalman Filter (EKF). Ekinox2 Subsea provides accurate ship motion data. To achieve the highest accuracy the device integrates data derived from aiding equipment such as GNSS RTK, DVL etc. Ekinox Series – Advanced Inertial Navigation Sensors – SBG Systems (sbg-systems.com)
- PING 3DSS-DX-450: the interferometric echosounder uses the state-of-the-art acoustic transducer technology, SoftSonar™ electronic and advanced signal processing techniques to obtain excellent bathymetry and 3D sidescans. 3DSS Sonar DX450 | Ping DSP

Navigation equipment
- Laser rangefinder LW20: the vessel is equipped with two LW20 mounted on the servo in the bow and stern part of HydroDron. This little rangefinder can measure objects up to 100 meters. LW20/C (100m) (lightwarelidar.com)
- RADAR UMRR 0C Type 42, 24GHz: this RADAR is a product of Smart Micro. It is designed to function in unfavorable conditions. It’s almost insensitive to atmospheric conditions and completely independent from sunlight. Works in a wide range of temperatures. Traffic Radar | smartmicro
- LiDAR Velodyne VLP–16: one of the most popular sensors on the market. The best in its class for excellent accuracy and calibrated intensity. It has a wide-angle of registration and rang up to 100 meters. This model is very popular in autonomous vehicles. Puck Lidar Sensor, High-Value Surround Lidar | Velodyne Lidar
- Camera Hikvision – Model DS-2CD2025FWD-I: one-directional camera which allows video registration with 2Mpix resolution. Waterproof and dustproof.
DS-2CD2025FWD-I | Seria Pro (EasyIP) | Hikvision - Camera PTZ Hikvision – Model DS-2DE3304W-DE: camera with high accuracy of imaging with a resolution of 3Mpix. Waterproof and dustproof, equipped with 4x optical zoom. DS-2DE3304W-DE | Seria Pro | Hikvision
- WX Ultrasonic WeatherStation: Airmar weather station. Measures apparent wind speed and wind direction, atmospheric pressure, air temperature, relative humidity, calculate dew point, and has mounted heat sensor. Weatherstation Instruments | Airmar
- 2x EchoRange 200kHz: Airmar echosounder that features embedded microelectronics that process depth and temperature inside the sensor that can be instantly displayed on any device that accepts NMEA data. EchoRange technology transfers NMEA 0183 data in real time to a computer via the RS422 standard. EchoRange Airmar


Modes of operation
Autonomous carrying out of missions – the basic setting for autonomous measurement. It allows you to set waypoints on which the unit will move, while also conducting data acquisition.
Adaptive autopilot – designed to move over longer distances without the direct participation of the operator. After determining the course, the unit will follow it regardless of the weather conditions, making adjustments to keep the given direction on an ongoing basis.
Dynamic positioning – a useful mode when it is necessary to maintain a fixed position. For example, when performing a sound velocity profile in the water. The unit will compress the influence of the wind and other forces acting on it to stop the drift and stay in one place as much as possible.
Manual control with autonomous navigation – allows you to switch to manual control (e.g. when mooring the vessel or to reach the measuring area). Additionally, the electronic map shows the position, course, and all relevant navigation information all the time.





Scientific publications related to HydroDron
Address
4/6 Roszczynialskiego St.
81-521 Gdynia
13/5 Niemena St.
81-603 Gdynia
37/5 Klonowica St.
71-248 Szczecin