


HydroDron



Projekt pn. “Opracowanie autonomicznej/zdalnie sterowanej pływającej platformy dedykowanej pomiarom hydrograficznym na akwenach ograniczonych.” realizowany jest w ramach konkursu Narodowego Centrum Badań i Rozwoju: INNOSBZ.
Przedmiotem projektu jest opracowanie autonomicznej/zdalnie sterowanej wielozadaniowej platformy nawodnej do działań na akwenach ograniczonych tj. w obszarach portów, na redach, kotwicowiskach, zalewach, zatokach i jeziorach, rzekach i innych obszarach ścieśnionych.
Projekt obejmuje 6 etapów składających się na cały proces realizacji i walidacji platformy począwszy od etapów definiujących wymagania, poprzez projekty: konstrukcji kadłuba, napędu, rozmieszczenia sensorów, oprogramowania, systemu nawigacji, modułu integracji czujników; budowę platformy, jej walidację i opracowanie metodyki eksploatacji.
Efekty realizacji projektu będą wdrożone do własnej działalności gospodarczej Marine Technology, poprzez rozpoczęcie świadczenia usług z wykorzystaniem opracowanego nowego produktu w postaci wielozadaniowej autonomicznej/zdalnie sterowanej platformy nawodnej (ASV) oraz poprzez wykonanie platform na zamówienie klientów zewnętrznych. Platforma będzie mogła wykonywać misje pomiarowe na akwenach ograniczonych w zakresie pomiarów batymetrycznych, sonarowych, LiDAR i innych w trybie autonomicznym realizując zaplanowaną trajektorię lub w trybie zdalnego sterowania, przydanego szczególnie w sytuacji trudnej nawigacyjnie.
Platforma – HydroDron cechuje się mobilnością, tj. istnieje możliwość przewożenia jej w rejon misji na przyczepie samochodowej bądź na większej jednostce nawodnej – statku bazie i wodowania z przyczepy z plaży, brzegu, nabrzeża, pomostu lub ze statku bazy. HydroDron może pracować na akwenach niedostępnych lub trudno dostępnych dla większych jednostek załogowych, których użycie może być niemożliwe bądź nieopłacalne. Takie zastosowanie jest szczególnie istotne na śródlądowych drogach wodnych w tym na Wiśle i Odrze, których znaczenie wobec dążeń do przenoszenia ładunków z dróg i autostrad na drogi wodne jest jednym z priorytetów Unii Europejskiej.
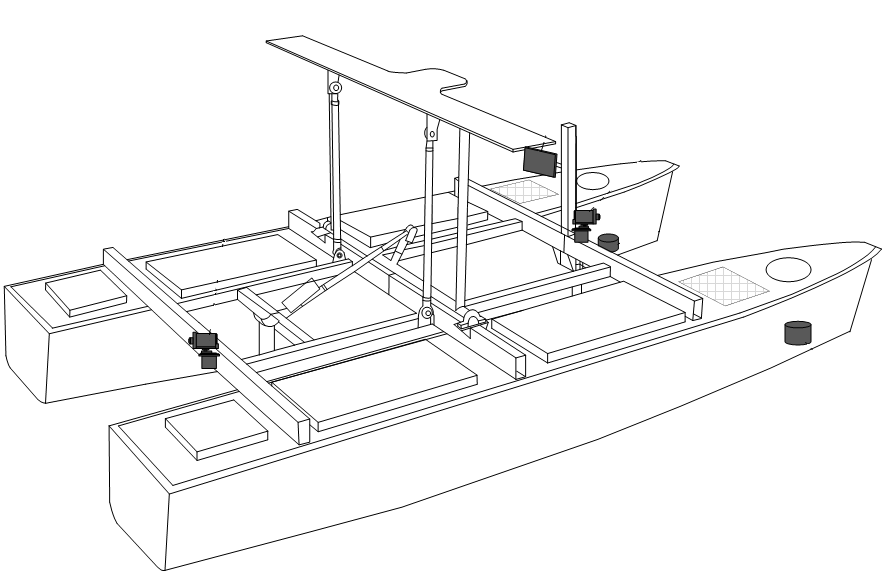
W ramach realizacji projektu opracowano wymagania dotyczące konstrukcji kadłuba i rodzaju napędu a następnie wykonano bezzałogowy katamaran z lekkiego trwałego tworzywa, o układzie dwukadłubowym (4m dł. i 2m szer.) oraz o niewielkim zanurzeniu od 20cm w części dziobowej do 50cm w części rufowej – silnikowej, wyposażony w dwa silniki elektryczne pracujące niezależnie od siebie Torqeedo Cruise 4.0 RL o mocy 4kW każdy, które zapewniają odpowiednią prędkość i manewrowość.
Jednostka została wyposażona w 16 akumulatorów LiFePo4 o napięciu 3,2V każdy, umieszczonych w dwóch niezależnych od siebie panelach akumulatorowych. Bateria akumulatorów doładowywana jest dodatkowo 2 panelami fotowoltaicznymi. Energia ta zapewnia pracę systemu do około 12 godzin z 710Wh nadmiaru energii elektrycznej.
Platforma cechuje się wielowariantowością realizowaną przy pomocy instalacji szerokiego spektrum wyposażenia pomiarowego. W jego skład wchodzą m.in.:
Sensory nawigacyjne zamontowane są na składanym automatycznie maszcie, który zapewnia bezpieczeństwo transportu jednostki oraz dojścia do rejonu pomiarowego.
Głowica hydrograficzna montowana jest na ruchomym siłowniku umożliwiającym zdalne podnoszenie i opuszczanie głowicy a profilomierz prędkości dźwięku w wodzie jest automatycznie opuszczany i podnoszony za pomocą specjalnej windy kotwicznej.
Jednostka wyposażona jest również w system sensorów do monitoringu sytuacji na i wokół platformy, w celu zwiększenia świadomości sytuacyjnej w tym dwie kamery wideo (obrotowa i stacjonarna) oraz stację pogodową. Poza danymi typowo nawigacyjnymi rejestrowane są dane video, informacje pogodowe, poziom napięcia akumulatorów, pozycja masztu i siłownika głowicy hydrograficznej, itp. Dane te są transmitowane do stacji brzegowej.
Stacja brzegowa składa się z dwóch konsol: dedykowanej konsoli nawigacyjnej z zabudowanym w skrzyni transportowej komputerem przemysłowym (oraz dodatkowo małej konsoli manewrowej do manewrowania bliskiego zasięgu w tym cumowania) i konsoli hydrograficznej z komputerem Getac.
Głównym oprogramowaniem hydrograficznym wykorzystywanym na platformie jest HYPACK MAX rozszerzony o dodatek HYSWEEP. Dzięki pracy w tym oprogramowaniu zapewniony jest cały proces pomiarów hydrograficznych od planowania prac pomiarowych aż po opracowania produktu finalnego. Dodatkowo wraz z zakupionym sprzętem hydrograficznym 3DSS-DX-450 firmy Ping DSP producent zapewnił szereg oprogramowania do zapisu danych i obsługi echosondy. Aplikacjami tego oprogramowania są: 3DSS-DX-Control, 3DSS-DX-Dsiplay, 3DSS-DX-Profile, 3DSS-DX-Converter, 3DSS-DX-Logger.
Film przedstawiający pracę z systemem 3DSS-DX-450

Pierwsze testy HydroDrona na wodzie zostały przeprowadzone w asyście jednostki pływającej w celu zapewnienia bezpieczeństwa żeglugi w rejonie prób oraz w celu udzielenia platformie niezbędnej pomocy technicznej. Testy wykonano w zakresie:
Wszystkie próby przebiegły pomyślnie, a wykonana w ramach realizacji projektu autonomiczna wielozadaniowa platforma pływająca HydroDron jest rozwiązaniem innowacyjnym na skalę co najmniej krajową.
Do pobrania


Publikacje naukowe związane z projektem HydroDron
Adres
ul. Roszczynialskiego 4 lok. 6
81-521 Gdynia
ul. Niemena 13 lok. 5
81-603 Gdynia
ul. Klonowica 37 lok. 5
71-248 Szczecin